Performance Curves
Request torque-speed, efficiency, and temperature-rise data for the quoted winding and cooling condition.
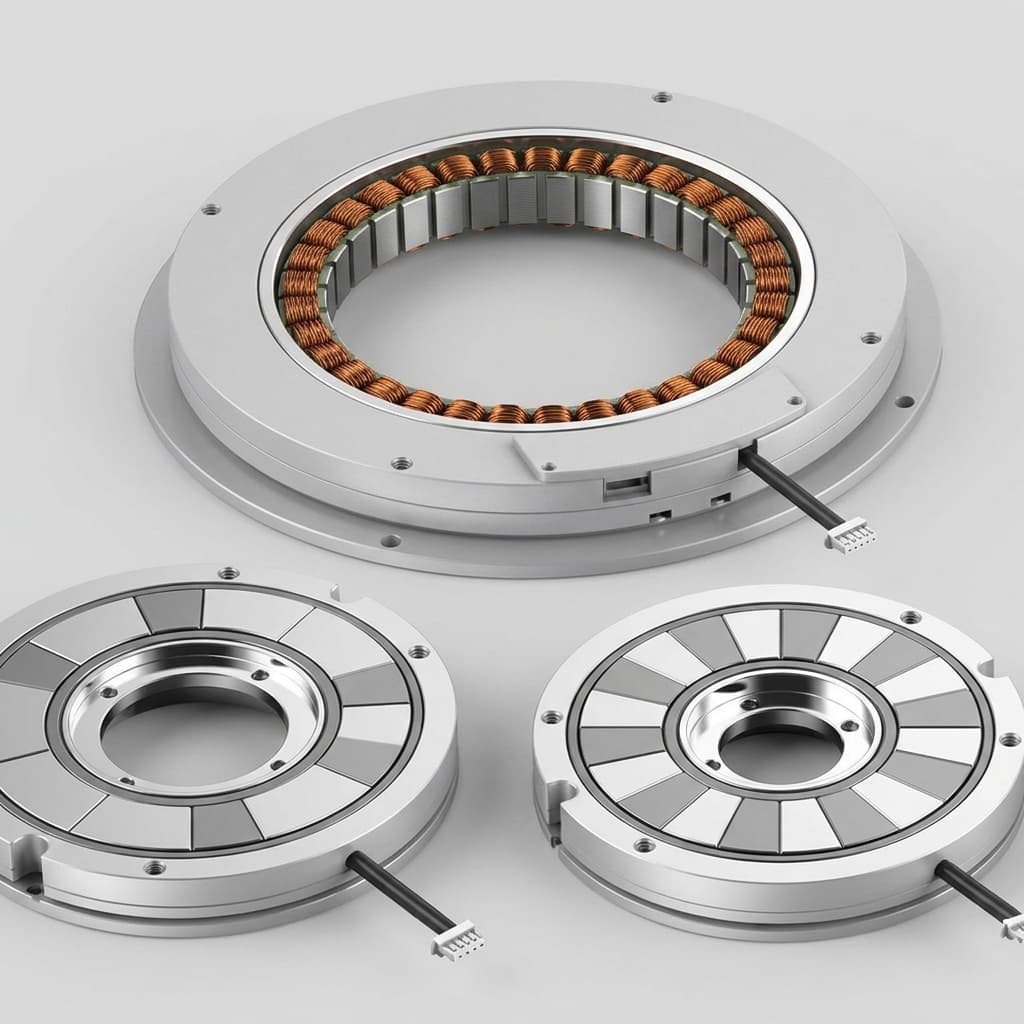
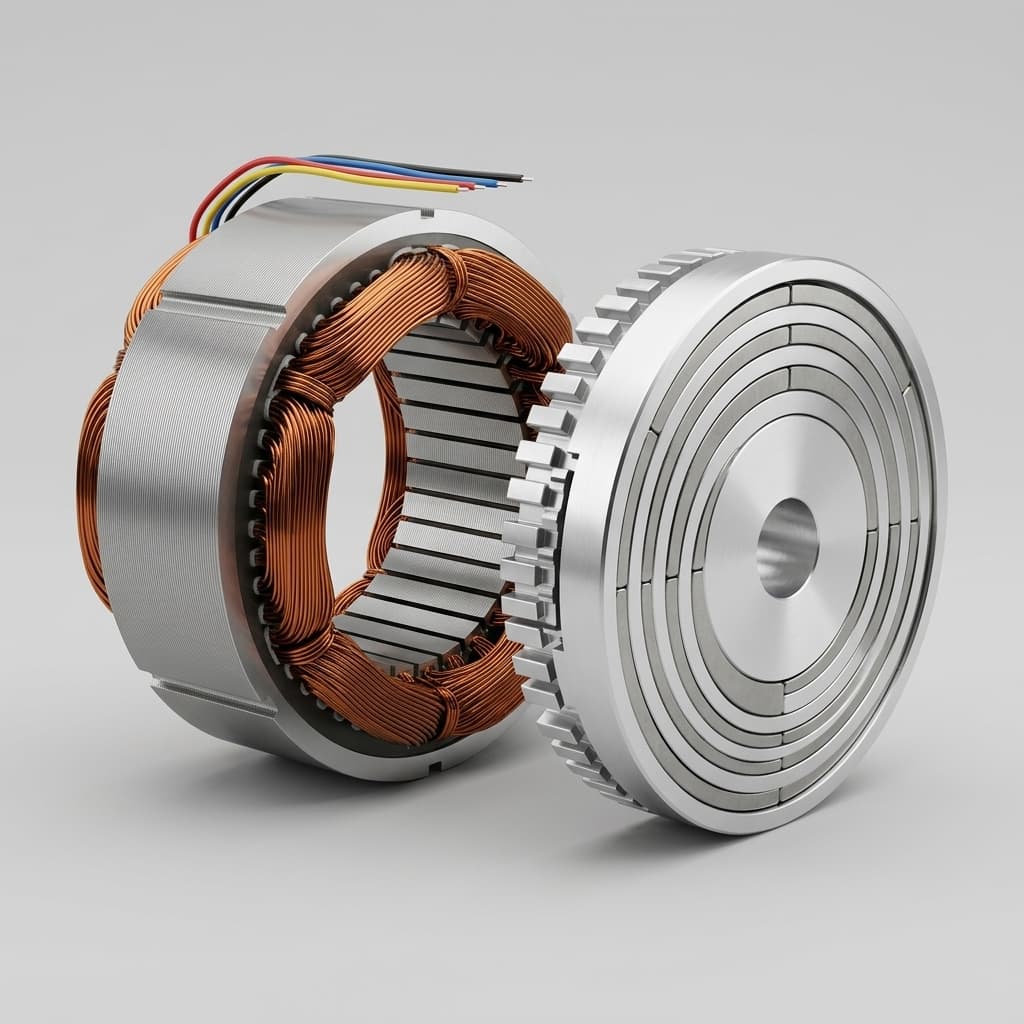
Rotor and stator motor kits for direct-drive rotary axes, robot joints, gimbals, and precision OEM machinery.
| Metric | Typical Range | Why It Matters |
|---|---|---|
| Continuous torque | 0.2-80 N·m by frame and cooling path | Defines sustained load capability after thermal limits are considered. |
| Peak torque | 2-4x continuous torque depending on duty cycle | Determines acceleration margin and transient disturbance handling. |
| Torque ripple | Application-dependent low-cogging design target | Critical for smooth robot motion, optical pointing, and inspection axes. |
Final values depend on motor size, winding, thermal path, and custom scope. Include these fields in the first RFQ so engineering can return a usable model or custom design path.
| Parameter | Unit | RFQ Note |
|---|---|---|
| Rated voltage | VDC | Match bus voltage and servo drive current limit. |
| Continuous torque | N·m | State thermal condition and duty cycle. |
| Peak torque | N·m | Define duration and repetition rate. |
| Rated / maximum speed | rpm | Include control and mechanical limits. |
| Torque constant Kt | N·m/Arms | Used for drive sizing and current estimate. |
| Motor constant Km | N·m/√W | Supports efficiency and heat comparison. |
| Back EMF constant | V/krpm | Must match speed and voltage ceiling. |
| Resistance / inductance | Ω / mH | Needed for drive tuning and thermal model. |
| Rotor inertia | kg·cm² | Affects acceleration and control response. |
| Weight / insulation class | kg / class | Supports payload, heat, and safety review. |
| Torque ripple | % or N·m | Critical for robotics, gimbals, and precision axes. |
Request torque-speed, efficiency, and temperature-rise data for the quoted winding and cooling condition.
2D drawings, datasheets, and STEP/IGES files are shared when the model family and project scope are clear.
Review stator mounting, rotor clamping, air gap, lead wires, and sensor compatibility before sample approval.
The table below is not a claim that every configuration has a fixed public catalog value. It is the data package an engineering buyer should request for the selected winding, frame size, and cooling basis before approving samples or CAD release.
| Data Group | Fields | Why Buyers Need It |
|---|---|---|
| Electrical constants | Kt, Km, back EMF constant, phase resistance, phase inductance | Confirms winding fit with bus voltage, drive current, speed ceiling, and tuning assumptions. |
| Mechanical data | OD, ID, stack length, rotor inertia, mass, mounting references, lead exit | Prevents CAD mismatch and helps the buyer validate acceleration and package constraints. |
| Thermal basis | Continuous rating condition, ambient temperature, housing/cooling assumption, insulation class | Separates sustainable torque from short-duration peak torque and avoids heat-path overclaims. |
| Performance curves | Torque-speed curve, efficiency notes, temperature-rise basis, peak torque duration | Lets the buyer compare real operating duty instead of relying on one headline torque number. |
| Inspection records | Resistance, back EMF, insulation / hi-pot, visual check, outgoing record format | Supports sample acceptance, supplier qualification, and repeat-order traceability. |

Yes. Share OD, ID, stack length, mounting method, torque-speed targets, voltage/current limits, and sensor requirements so engineering can review a custom path.
Standard drawings and datasheet files can be shared during RFQ. STEP or IGES files are provided when the mechanical interface and project scope are clear.
Inquiry Email
Include target torque/speed, quantity, and delivery location.