Mechanical Fit
OD, ID, stack length, air gap, rotor retention, lead exit, and sensor space are checked against the real axis envelope.
Factory-side rotor and stator kit sourcing for robot joints, hollow-shaft gimbals, medical devices, and precision automation. Send your envelope, torque-speed duty, voltage, cooling path, and sample target for a practical RFQ response.
Inquiry Email
Include target torque/speed, quantity, and delivery location.
Shenzhen/Dongguan factory-side coordination for rotor and stator kit projects.
Winding, stack length, lead wire, sensor, and interface adaptation.
Back EMF, insulation, torque, thermal, and outgoing record planning.
What Buyers Need to De-Risk First
The first supplier conversation should clarify fit, performance evidence, sample path, and production readiness.
OD, ID, stack length, air gap, rotor retention, lead exit, and sensor space are checked against the real axis envelope.
Continuous torque, peak torque, speed, duty cycle, voltage, current limit, and cooling assumptions are reviewed together.
Back EMF, resistance, insulation, torque behavior, thermal rise, and outgoing records can be aligned to project risk.
Prototype quantity, revision control, forecast, packaging, and delivery milestones are planned before commercial release.
Buyer Priorities
Most buyers are not looking for another generic motor catalog. They need a fast answer on fit, duty, sample risk, and supplier evidence before starting a detailed RFQ.
OD, ID, stack length, bearing space, encoder space, lead exit, and air-gap control.
Continuous torque, peak duration, speed, duty cycle, housing material, and cooling method.
Separate fit check, electrical startup, thermal rise, motion behavior, and pilot acceptance.
Request configuration notes, process photos, resistance, back EMF, insulation, and outgoing checks.
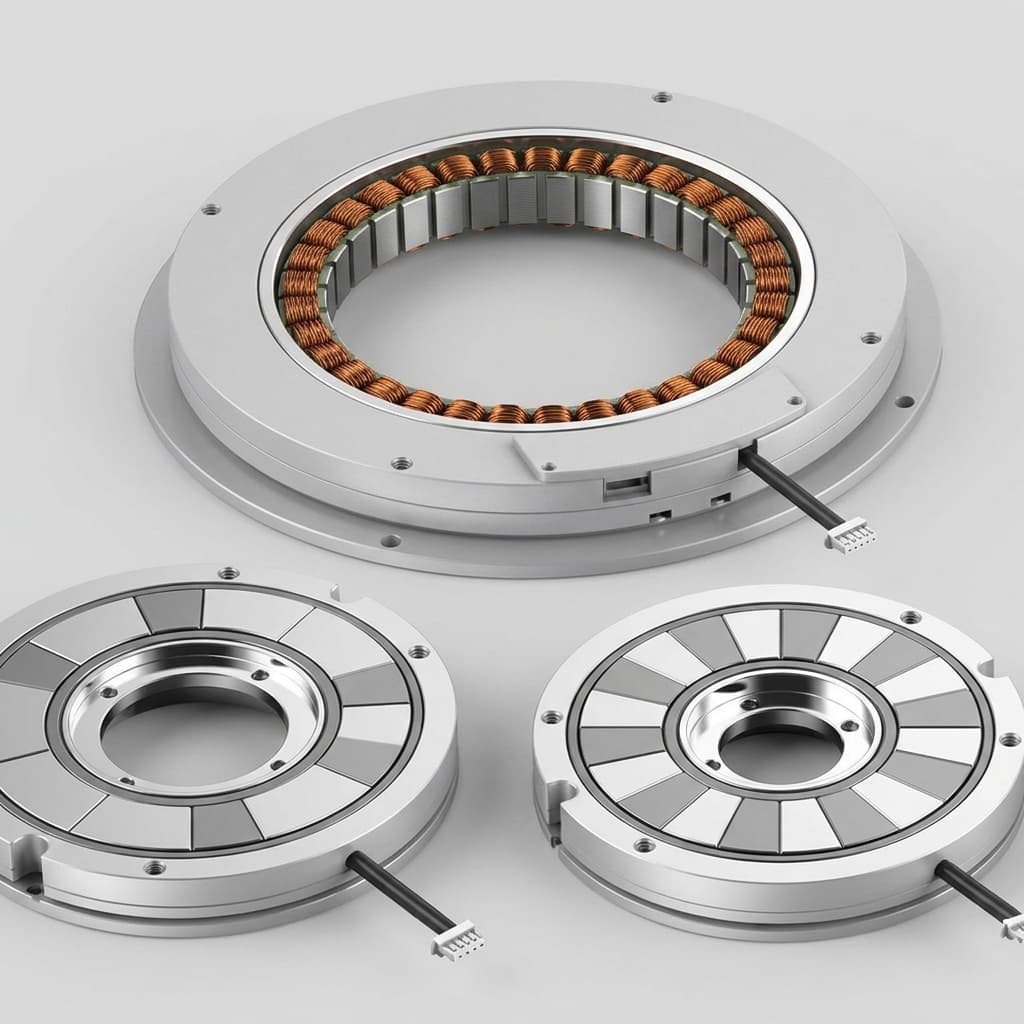
Product Range
Buyers usually need to compare physical architecture before comparing price. The homepage now shows the main product shapes early: standard frameless kits, compact robot-joint motors, large hollow-shaft designs, and custom OEM assemblies.
Rotor and stator sets for compact direct-drive axes.
High torque density layouts for actuator modules.

Large-aperture motors for cabling, optics, and gimbals.

Geometry, winding, lead exit, and interface adaptation.
Application Fit Map
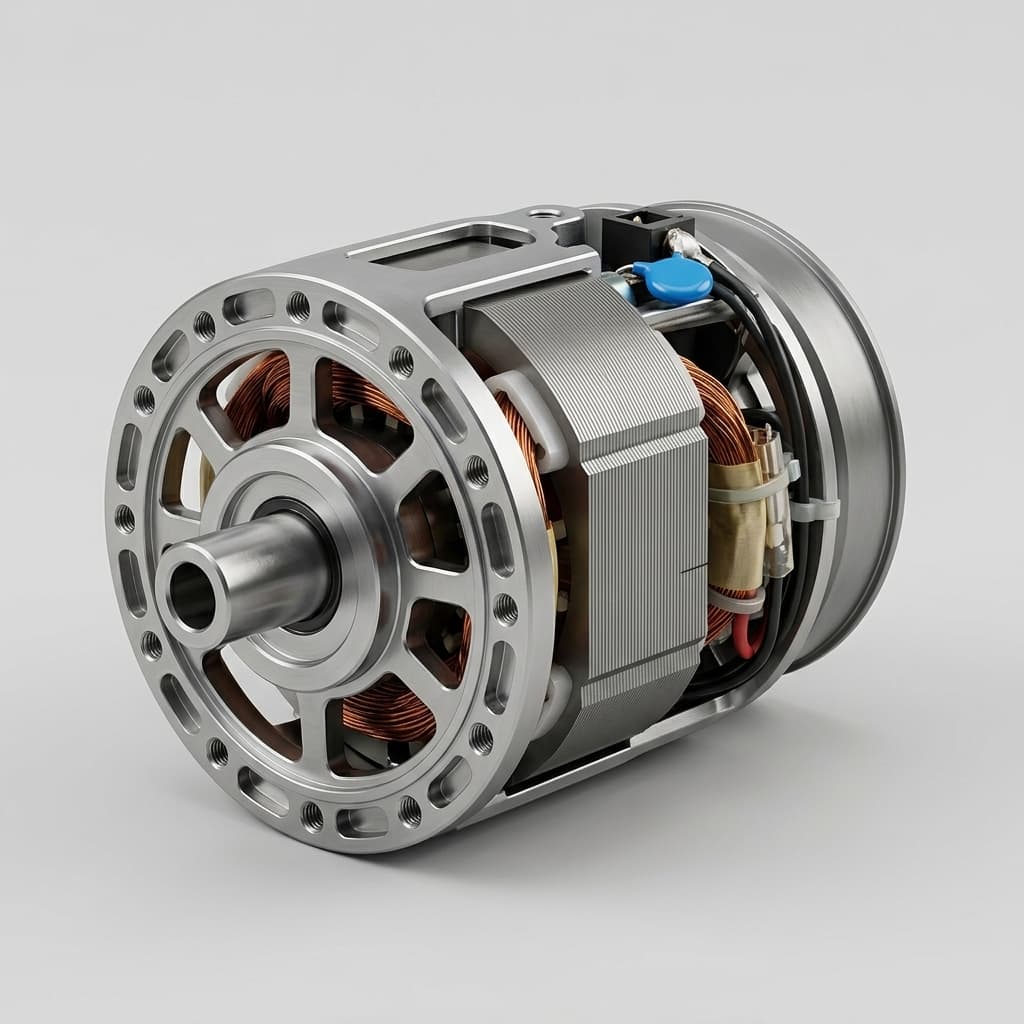
The same frameless torque motor family can behave very differently in a robot joint, gimbal, medical module, or indexing table. This map helps buyers start with the right engineering question instead of comparing only diameter and peak torque.
Review: Torque density, reducer fit, cable routing, encoder space, and low-speed smoothness.
Evidence: Ask for winding match, rotor retention notes, thermal assumptions, and sample revision control.
Review: Through-hole size, bearing stack, air-gap control, slip-ring space, and torque ripple sensitivity.
Evidence: Ask for concentricity discussion, assembly handling notes, and back EMF / resistance records.

Review: Repeatability, thermal drift, indexing duty, clean assembly needs, and drive tuning headroom.
Evidence: Ask for outgoing checks, dimensional confirmation, and validation plan tied to your duty cycle.
Review: Non-standard OD/ID, stack length, lead exit, sensor interface, potting, and packaging constraints.
Evidence: Ask for DFM notes, sample gate plan, production route, and repeat-order quality record scope.
RFQ Readiness Snapshot
The strongest inquiries include geometry, duty cycle, electrical limits, cooling assumptions, and sample targets.
Typical Geometry Review
Configuration Review
Initial Response Target
Validation Route
Buyers usually do not need a sales promise first. They need to know whether the supplier can translate a constrained axis into a controlled motor configuration, then prove the sample is moving toward production instead of becoming a one-off part.
Architecture review
Sample gate
Production route
| Stage | Buyer Sends | We Align |
|---|---|---|
| First RFQ | Envelope, torque-speed duty, voltage, cooling, sample target | Suitable motor family, winding direction, risk questions, missing data |
| Sample | Drawing revision, acceptance priorities, test setup, assembly limits | Sample record, resistance / back EMF / insulation checks, fit feedback |
| Pilot | Pilot quantity, packaging needs, revision freeze, delivery window | Production route, outgoing record scope, packaging plan, shipment cadence |
Practical buyer-side checklists, decision frameworks, and technical insights from our OEM engineering team.
A practical selection guide for engineers comparing frameless torque motors by torque-speed duty, OD/ID geometry, winding, cooling path, and RFQ readiness.


A buyer-side guide to using hollow-shaft frameless torque motors for optical gimbals, cable pass-through axes, indexing tables, and low-backlash direct-drive systems.
How robotics teams should evaluate frameless robot joint motors by torque density, hollow-shaft routing, reducer fit, thermal rise, torque ripple, and prototype risk.
FAQ
Share your drawing, torque-speed duty, voltage/current limit, cooling method, sample quantity, and target schedule. We will review the motor path and reply through email or WhatsApp.
Inquiry Email
Include target torque/speed, quantity, and delivery location.
A short inquiry is enough to start, but a stronger RFQ lets engineering answer with a realistic motor path instead of generic catalog suggestions.
| Decision Stage | Best Page | What You Gain |
|---|---|---|
| Architecture fit | Products | Compare torque motor families, geometry, thermal path, and RFQ input requirements. |
| Application risk | Solutions / Applications | Review scenario-based risk controls and measurable validation checkpoints. |
| Supplier execution | OEM Capabilities | Understand DFM, prototype control, quality records, and export delivery governance. |
| Execution start | Contact / RFQ | Use the inquiry checklist to reduce quote loops and get a faster actionable response. |
For deeper decision support, review our engineering blog where each post includes practical buyer-side checklists.